Binder IPC 线程调度模型
主线程与普通线程
Binder 线程可以分为两类:主线程 和 普通线程,它们的区别是:
主线程名称为
Binder_1orBinder:<pid>_1,普通线程则从 2 开始(ProcessState::makeBinderThreadName)主线程在应用进程起来后立刻启动,且不会退出;普通线程由 BR_SPAWN_LOOPER 启动且会被 binder driver 命令
TIMED_OUT退出(IPCThreadState::joinThreadPool)binder 线程上限(
BINDER_SET_MAX_THREADS)只影响普通线程,更确切地说是只影响通过BR_SPAWN_LOOPER - BC_REGISTER_LOOPER创建的 binder 线程
Binder 主线程是在其所在进程的初始化流程里启动的,Java 层进程的创建都是通过 Process.start() 方法,向 Zygote 进程发出创建进程的 socket 消息,Zygote 进程收到消息后会调用 Zygote.forkAndSpecialize() 来 fork 出新进程,在新进程中会调用到 RuntimeInit.nativeZygoteInit() 方法,该方法经过 jni 映射最终会调用到 app_main.cpp 中的 onZygoteInit,那么接下来从这个方法说起
/**
* The main function called when started through the zygote process. This could be unified with
* main(), if the native code in nativeFinishInit() were rationalized with Zygote startup.
*/
public static Runnable zygoteInit(int targetSdkVersion, long[] disabledCompatChanges,
String[] argv, ClassLoader classLoader) {
// ...
ZygoteInit.nativeZygoteInit();
return RuntimeInit.applicationInit(targetSdkVersion, disabledCompatChanges, argv,
classLoader);
}
// https://cs.android.com/android/platform/superproject/+/master:frameworks/base/core/jni/AndroidRuntime.cpp
static void com_android_internal_os_ZygoteInit_nativeZygoteInit(JNIEnv* env, jobject clazz)
{
gCurRuntime->onZygoteInit(); // AppRuntime->onZygoteInit()
}
// https://cs.android.com/android/platform/superproject/+/master:frameworks/base/cmds/app_process/app_main.cpp
virtual void onZygoteInit()
{
// 上面介绍过,ProcessState 是单例模式,初始化实例时会:
// 1,打开 binder driver:open("/dev/binder") && mmap
// 2,版本查询和校验:BINDER_VERSION
// 3,设置线程数:BINDER_SET_MAX_THREADS
// ...
sp<ProcessState> proc = ProcessState::self();
ALOGV("App process: starting thread pool.\n");
proc->startThreadPool();
}
// 开启 binder 主线程执行 binder 消息通讯的 loop:IPCThreadState::self()->joinThreadPool = talkWithDriver + executeCommand
// https://cs.android.com/android/platform/superproject/+/master:frameworks/native/libs/binder/ProcessState.cpp
void ProcessState::startThreadPool()
{
AutoMutex _l(mLock);
if (!mThreadPoolStarted) {
mThreadPoolStarted = true;
spawnPooledThread(true);
}
}
// spawn - 产卵
// spawnPooledThread 是创建 binder 线程的核心函数,它创建新线程执行 IPCThreadState::joinThreadPool
// 新的 binder 线程的生命流程:
// 1,往 binder 发送 BC_ENTER_LOOPER(主线程) or BC_REGISTER_LOOPER(普通线程)
// 2. 主循环:getAndExecuteCommand()
// 3. 退出循环时发送 BC_EXIT_LOOPER 给 binder driver
void ProcessState::spawnPooledThread(bool isMain /* true 表示主线程 */)
{
if (mThreadPoolStarted) {
String8 name = makeBinderThreadName(); // Binder_x or Binder:<pid>_x
ALOGV("Spawning new pooled thread, name=%s\n", name.string());
sp<Thread> t = sp<PoolThread>::make(isMain);
t->run(name.string());
pthread_mutex_lock(&mThreadCountLock);
mKernelStartedThreads++;
pthread_mutex_unlock(&mThreadCountLock);
}
}
class PoolThread : public Thread
{
virtual bool threadLoop()
{
IPCThreadState::self()->joinThreadPool(mIsMain);
return false;
}
};
void IPCThreadState::joinThreadPool(bool isMain) // binder 线程的整个生命流程
{
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
status_t result;
mIsLooper = true;
do {
processPendingDerefs();
// now get the next command to be processed, waiting if necessary
result = getAndExecuteCommand();
// Let this thread exit the thread pool if it is no longer
// needed and it is not the main process thread.
if(result == TIMED_OUT && !isMain) { // 可以看到主线程与普通线程的区别之一:主线程永远不会主动退出
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
mOut.writeInt32(BC_EXIT_LOOPER);
mIsLooper = false;
talkWithDriver(false);
}
// 主线程注册(BC_REGISTER_LOOPER)和普通线程注册(BC_ENTER_LOOPER)很类似
// 都是打开标志位 BINDER_LOOPER_STATE_ENTERED or BINDER_LOOPER_STATE_REGISTERED
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
case BC_REGISTER_LOOPER:
binder_inner_proc_lock(proc);
if (thread->looper & BINDER_LOOPER_STATE_ENTERED) {
thread->looper |= BINDER_LOOPER_STATE_INVALID;
binder_user_error("%d:%d ERROR: BC_REGISTER_LOOPER called after BC_ENTER_LOOPER\n",
proc->pid, thread->pid);
} else if (proc->requested_threads == 0) {
thread->looper |= BINDER_LOOPER_STATE_INVALID;
binder_user_error("%d:%d ERROR: BC_REGISTER_LOOPER called without request\n",
proc->pid, thread->pid);
} else {
proc->requested_threads--;
proc->requested_threads_started++;
}
thread->looper |= BINDER_LOOPER_STATE_REGISTERED;
binder_inner_proc_unlock(proc);
break;
case BC_ENTER_LOOPER:
if (thread->looper & BINDER_LOOPER_STATE_REGISTERED) {
thread->looper |= BINDER_LOOPER_STATE_INVALID;
binder_user_error("%d:%d ERROR: BC_ENTER_LOOPER called after BC_REGISTER_LOOPER\n",
proc->pid, thread->pid);
}
thread->looper |= BINDER_LOOPER_STATE_ENTERED;
break;
}binder 线程命名
// binder 线程命名规则:Binder_x(如果 >= Android N 则是 Binder:<pid>_x)
// 其中的 x 从 1 开始
// https://cs.android.com/android/platform/superproject/+/master:frameworks/native/libs/binder/ProcessState.cpp
String8 ProcessState::makeBinderThreadName() {
int32_t s = android_atomic_add(1, &mThreadPoolSeq);
pid_t pid = getpid();
std::string_view driverName = mDriverName.c_str();
android::base::ConsumePrefix(&driverName, "/dev/");
String8 name;
name.appendFormat("%.*s:%d_%X", static_cast<int>(driverName.length()), driverName.data(), pid,
s);
return name;
}
ProcessState::ProcessState(const char* driver)
: mDriverName(String8(driver)),
mDriverFD(-1),
mVMStart(MAP_FAILED),
mThreadCountLock(PTHREAD_MUTEX_INITIALIZER),
mThreadCountDecrement(PTHREAD_COND_INITIALIZER),
mExecutingThreadsCount(0),
mWaitingForThreads(0),
mMaxThreads(DEFAULT_MAX_BINDER_THREADS),
mCurrentThreads(0),
mKernelStartedThreads(0),
mStarvationStartTimeMs(0),
mForked(false),
mThreadPoolStarted(false),
mThreadPoolSeq(1), // binder 线程名的序号从 1 开始
mCallRestriction(CallRestriction::NONE) {
// ...
}创建普通线程
流程概览:binder driver 在满足以下条件的情况下,发送 BR_SPAWN_LOOPER 给应用进程,应用进程开启新线程 ProcessState::spawnPooledThread(false) 后,发送 BC_REGISTER_LOOPER 告知 binder driver 线程已启动
有三种情况可以进入 binder_thread_read done 代码段:
当 binder driver 处理类型为
BINDER_WORK_TRANSACTION的任务,即 binder driver 收到的命令是BC_TRANSACTION(client 发送 request 至 binder) orBC_REPLY(server 响应 response 至 binder)当前线程的 return_error 发生 error
Binder Driver 向 client 发送死亡通知
BR_DEAD_BINDER
按需启动普通 binder 线程的条件:
- 进程没有请求创建 binder 线程
proc->requested_threads == 0
@requested_threads: number of binder threads requested but not yet started. In current implementation, can only be 0 or 1.
binder 发送 BR_SPAWN_LOOPER 给应用进程后将 requested_threads 置真,直到应用进程将新线程启动并回复 BC_REGISTER_LOOPER 后才将 requested_threads 置假
- 没有等待/阻塞在进程 todo list 的 client thread,
list_empty(&thread->proc->waiting_threads)
@waiting_threads: threads currently waiting for proc work
参考 client 线程调度例子 里的 binder_wait_for_work
- 已启动的 binder 线程数小于上限,
proc->requested_threads_started < proc->max_threads
binder 线程池上限默认 15,可通过 BINDER_SET_MAX_THREADS 修改
- 当前线程已从应用进程收到
BC_ENTER_LOOPERorBC_REGISTER_LOOPER,thread->looper & (BINDER_LOOPER_STATE_REGISTERED | BINDER_LOOPER_STATE_ENTERED)
参考 主线程与普通线程
// https://cs.android.com/android/kernel/superproject/+/common-android-mainline:common/drivers/android/binder.c
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
// ...
done:
*consumed = ptr - buffer;
binder_inner_proc_lock(proc);
if (proc->requested_threads == 0 &&
list_empty(&thread->proc->waiting_threads) &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED)) /* the user-space code fails to */
/*spawn a new thread if we leave this out */) {
proc->requested_threads++;
binder_inner_proc_unlock(proc);
if (put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer))
return -EFAULT;
binder_stat_br(proc, thread, BR_SPAWN_LOOPER);
} else
binder_inner_proc_unlock(proc);
return 0;
}
// 应用进程收到 BR_SPAWN_LOOPER 后启动新的 binder 普通线程,参考【主线程与普通线程】对 spawnPooledThread(false) 的解析
// https://cs.android.com/android/platform/superproject/+/master:system/libhwbinder/IPCThreadState.cpp
status_t IPCThreadState::executeCommand(int32_t cmd)
{
case BR_SPAWN_LOOPER:
mProcess->spawnPooledThread(false);
break;
}
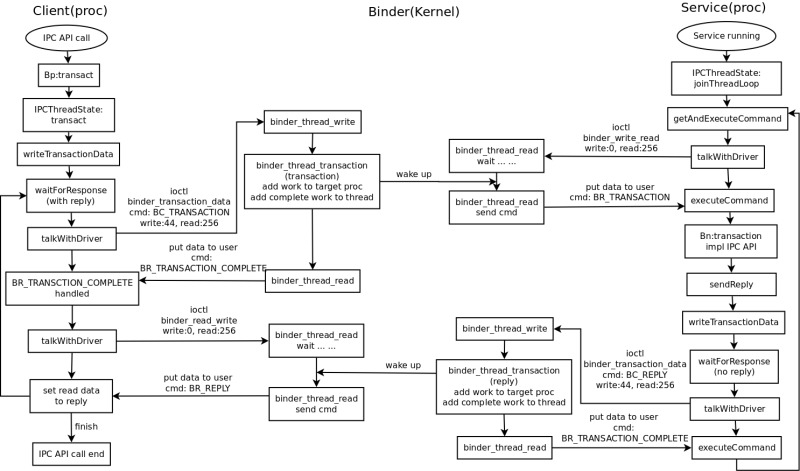
client 线程调度例子
一次事务 binder_thread.transaction_stack 表示:client 发起请求 -> server 处理并返回响应 -> client 收到响应这么一整个流程,类似于一次完整的 HTTP 请求
client 是单线程即发起 Binder IPC 的那个线程,将 request 添加到目标进程 binder_proc.todo 或者目标线程 binder_thread.todo 的任务列表后,通过 schedule() 让渡出 cpu 资源从而实现 线程休眠,直到 server 返回响应唤醒它(wake_up)
binder_thread_write 将 request 添加到目标进程/目标线程的 todo 任务队列,binder_thread_read 将休眠此 client 线程直到被 server reponse 唤醒
ActivityManager.getRunningAppProcesses // APP 进程 Java 层
IServiceManager.Stub.Proxy.getRunningAppProcesses
BinderProxy.transact(int code, Parcel data, Parcel reply, int flags)
BpBinder.transact(uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) // APP 进程 native 层
IPCThreadState::self()->transact(binderHandle(), code, data, reply, flags)
IPCThreadState::writeTransactionData(BC_TRANSACTION, flags, handle, code, data, nullptr)
IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
IPCThreadState::talkWithDriver(bool doReceive)
ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) // 陷入内核来到 binder driver
binder_ioctl
// https://cs.android.com/android/kernel/superproject/+/common-android-mainline:common/drivers/android/binder.c
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread /* 当前线程,此时即是 client 执行 request 的线程 */ )
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
unsigned int size = _IOC_SIZE(cmd); // sizeof(struct binder_write_read)
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
if (size != sizeof(struct binder_write_read)) {
ret = -EINVAL;
goto out;
}
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) { // 从用户进程地址空间拷贝 struct binder_write_read 至内核
ret = -EFAULT;
goto out;
}
// binder_write_read.write_size > 0 表示用户进程有数据发送到内核驱动
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread,
bwr.write_buffer,
bwr.write_size,
&bwr.write_consumed);
trace_binder_write_done(ret);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
// binder_write_read.read_size > 0 表示用户进程希望内核驱动返回 read_size 大小的数据给他
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
trace_binder_read_done(ret);
binder_inner_proc_lock(proc);
if (!binder_worklist_empty_ilocked(&proc->todo))
binder_wakeup_proc_ilocked(proc);
binder_inner_proc_unlock(proc);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) { // 处理成功,将 struct binder_write_read 从内核拷贝/覆盖至用户进程空间
ret = -EFAULT;
goto out;
}
// ...
}
// 将数据 binder_buffer 从用户内存空间发送到内核地址空间
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, /* binder_write_read.write_buffer */
size_t size, /* binder_write_read.write_size */
binder_size_t *consumed) /* 输出,从 write_buffer 读取了多少数据 */
{
uint32_t cmd;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer; // write_buffer 起始地址
void __user *ptr = buffer + *consumed; // 指示器,标识下一次读取的位置
void __user *end = buffer + size; // write_buffer 结束地址
while (ptr < end && thread->return_error == BR_OK) {
if (get_user(cmd, (uint32_t __user *)ptr)) // 从用户内存空间 write_buffer 拷贝 4 bytes 到 cmd
return -EFAULT;
ptr += sizeof(uint32_t);
trace_binder_command(cmd);
if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
binder_stats.bc[_IOC_NR(cmd)]++;
proc->stats.bc[_IOC_NR(cmd)]++;
thread->stats.bc[_IOC_NR(cmd)]++;
}
switch (cmd) { // write 是指将数据从用户内存空间发送到内核内存空间
case BC_TRANSACTION: // 客户端的请求数据 client request
case BC_REPLY: { // 服务端的响应数据 server response
struct binder_transaction_data tr; // 它们使用的数据结构都是 binder_transaction_data
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
binder_transaction**(proc, thread, &tr, cmd == BC_REPLY);
break;
}
// ...
}
}
}
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr,
int reply) // false: client request, true: server response
{
struct binder_transaction *t;
struct binder_work *tcomplete;
binder_size_t *offp, *off_end;
binder_size_t off_min;
struct binder_proc *target_proc;
struct binder_thread *target_thread = NULL;**
struct binder_node *target_node = NULL;
struct list_head *target_list;
wait_queue_head_t *target_wait;
struct binder_transaction *in_reply_to = NULL;
struct binder_transaction_log_entry *e;
uint32_t return_error;
e = binder_transaction_log_add(&binder_transaction_log);
e->call_type = reply ? 2 : !!(tr->flags & TF_ONE_WAY);
e->from_proc = proc->pid;
e->from_thread = thread->pid;
e->target_handle = tr->target.handle;
e->data_size = tr->data_size;
e->offsets_size = tr->offsets_size;
if (reply) { // BC_REPLY 说明这是一个 Server 发给 Client 的事务处理回复,在 server 端的线程上
// ...
} else { // BC_TRANSACTION 说明这是一个 Client 发给 Server 的请求事务,在 Client 端线程上
if (tr->target.handle) { // 确定目标进程 target_proc
struct binder_ref *ref;
ref = binder_get_ref(proc, tr->target.handle);
if (ref == NULL) {
binder_user_error("%d:%d got transaction to invalid handle\n",
proc->pid, thread->pid);
return_error = BR_FAILED_REPLY;
goto err_invalid_target_handle;
}
target_node = ref->node;
} else { // handle == 0 表示是 service manager 进程
target_node = binder_context_mgr_node;
if (target_node == NULL) {
return_error = BR_DEAD_REPLY;
goto err_no_context_mgr_node;
}
}
e->to_node = target_node->debug_id;
target_proc = target_node->proc;
if (target_proc == NULL) {
return_error = BR_DEAD_REPLY;
goto err_dead_binder;
}
if (security_binder_transaction(proc->tsk,
target_proc->tsk) < 0) {
return_error = BR_FAILED_REPLY;
goto err_invalid_target_handle;
}
// 确定目标线程 target_thread
// 非 one_way(需要replay),则从栈顶向下搜索,从历史事务记录中过滤出与目标进程的通讯记录,复用以往使用过的线程
if (!(tr->flags & TF_ONE_WAY) && thread->transaction_stack) {
struct binder_transaction *tmp;
tmp = thread->transaction_stack;
if (tmp->to_thread != thread) {
binder_user_error("%d:%d got new transaction with bad transaction stack, transaction %d has target %d:%d\n",
proc->pid, thread->pid, tmp->debug_id,
tmp->to_proc ? tmp->to_proc->pid : 0,
tmp->to_thread ?
tmp->to_thread->pid : 0);
return_error = BR_FAILED_REPLY;
goto err_bad_call_stack;
}
while (tmp) {
if (tmp->from && tmp->from->proc == target_proc)
target_thread = tmp->from;
tmp = tmp->from_parent;
}
}
}
// 找到 target_thread, 则 target_list 和 target_wait 分别初始化为目标线程的 todo 和 wait
// 这个意味着 client thread 与目标进程有过通讯记录
if (target_thread) {
e->to_thread = target_thread->pid;
target_list = &target_thread->todo;
target_wait = &target_thread->wait;
} else {
// 没有找到 target_thread, 那么 target_list 和 target_wait 分别初始化为目标进程的 todo 和 wait
// 这个情况只有BC_TRANSACTION命令才有可能发生
target_list = &target_proc->todo;
target_wait = &target_proc->wait;
}
e->to_proc = target_proc->pid;
// 发送到目标进程 todo 列表的事务,由目标进程处理
t = kzalloc(sizeof(*t), GFP_KERNEL);
if (t == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_t_failed;
}
binder_stats_created(BINDER_STAT_TRANSACTION);
// 发送到本线程 todo 列表的任务,该 binder_work 会发送 BR_WORK_TRANSCAION_COMPLETE 给目标进程,告知请求/回复已发送出去
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
if (tcomplete == NULL) {
return_error = BR_FAILED_REPLY;
goto err_alloc_tcomplete_failed;
}
binder_stats_created(BINDER_STAT_TRANSACTION_COMPLETE);
// 初始化 binder_transaction
if (!reply && !(tr->flags & TF_ONE_WAY)) // BC_TRANSACTION 且不是 one way,即需要 replay,则发起线程(from)设为当前线程
t->from = thread;
else // BC_REPLY,from 置为空
t->from = NULL;
t->sender_euid = task_euid(proc->tsk);
t->to_proc = target_proc;
t->to_thread = target_thread;
t->code = tr->code;
t->flags = tr->flags;
t->priority = task_nice(current);
trace_binder_transaction(reply, t, target_node);
t->buffer = **binder_alloc_buf**(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
if (t->buffer == NULL) {
return_error = BR_FAILED_REPLY;
goto err_binder_alloc_buf_failed;
}
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id;
t->buffer->transaction = t;
t->buffer->target_node = target_node;
trace_binder_transaction_alloc_buf(t->buffer);
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);
// 做一些内存拷贝工作,从用户内存空间 -> 内核空间
// ...
if (reply) { // 事务处理完成,将本次 reply 对应的 transaction 从目标线程(Client)事务栈中移除,并释放其所占用的地址空间
BUG_ON(t->buffer->async_transaction != 0);
binder_pop_transaction(target_thread, in_reply_to);
} else if (!(t->flags & TF_ONE_WAY)) {
// 一个 client 到 server 的 transaction,且需要 reply,将本次事务加入到本线程(client)事务栈中
BUG_ON(t->buffer->async_transaction != 0);
t->need_reply = 1;
t->from_parent = thread->transaction_stack;
thread->transaction_stack = t;
} else {
BUG_ON(target_node == NULL);
BUG_ON(t->buffer->async_transaction != 1);
if (target_node->has_async_transaction) {
target_list = &target_node->async_todo;
*target_wait = NULL;
} else
target_node->has_async_transaction = 1;
}
// 将事务 binder_transaction 加入至目标进程 or 目标线程的 todo 列表
t->work.type = BINDER_WORK_TRANSACTION;
list_add_tail(&t->work.entry, target_list);
// 添加一个事务到本线程的 todo 队列中,稍后在处理 todo 队列时(binder_thread_write)
// 该 binder_work 会发送 BR_WORK_TRANSCAION_COMPLETE 给目标进程,告知请求/回复已发送出去
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
list_add_tail(&tcomplete->entry, &thread->todo);
// 唤醒休眠在 target_wait 上的线程去处理 todo 列表
if (target_wait)
wake_up_interruptible(target_wait);
return;
err_get_unused_fd_failed:
err_fget_failed:
err_fd_not_allowed:
err_binder_get_ref_for_node_failed:
err_binder_get_ref_failed:
// ... 异常处理
}
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
// 当前的写入位置为 bwr.read_buffer 的起始位置,先写入一个 BR_NOOP 命令到 read_buffer 中
// 该命令在用户态是一个空操作,什么也不做,主要意义应该是在输出日志等
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
// !thread->transaction_stack &&
// binder_worklist_empty_ilocked(&thread->todo) &&
// (thread->looper & (BINDER_LOOPER_STATE_ENTERED | BINDER_LOOPER_STATE_REGISTERED))
//
// 如果线程的事务栈和 todo 列表都为空,表示线程没有任务要做,则去执行线程所在进程的 todo 列表上的任务
retry:
binder_inner_proc_lock(proc);
wait_for_proc_work = binder_available_for_proc_work_ilocked(thread);
binder_inner_proc_unlock(proc);
thread->looper |= BINDER_LOOPER_STATE_WAITING;
trace_binder_wait_for_work(wait_for_proc_work,
!!thread->transaction_stack,
!binder_worklist_empty(proc, &thread->todo));
if (wait_for_proc_work) {
if (!(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED))) {
binder_user_error("%d:%d ERROR: Thread waiting for process work before calling BC_REGISTER_LOOPER or BC_ENTER_LOOPER (state %x)\n",
proc->pid, thread->pid, thread->looper);
wait_event_interruptible(binder_user_error_wait,
binder_stop_on_user_error < 2);
}
trace_android_vh_binder_restore_priority(NULL, current);
binder_restore_priority(thread, &proc->default_priority);
}
// thread->process_todo ||
// thread->looper_need_return ||
// (do_proc_work && !binder_worklist_empty_ilocked(&thread->proc->todo))
//
// 如上面所说,线程自己的事务栈和 todo 为空,且进程的 todo 也为空,则线程没有任务要执行
// 非阻塞的情况下,返回 EAGAIN 让调用者重试
if (non_block) {
if (!binder_has_work(thread, wait_for_proc_work))
ret = -EAGAIN;
} else { // 阻塞情况下,休眠当前线程直到别的线程 wake_up() 唤醒它
ret = binder_wait_for_work(thread, wait_for_proc_work);
}
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
if (ret)
return ret;
while (1) {
uint32_t cmd;
struct binder_transaction_data_secctx tr;
struct binder_transaction_data *trd = &tr.transaction_data;
struct binder_work *w = NULL;
struct list_head *list = NULL;
struct binder_transaction *t = NULL;
struct binder_thread *t_from;
size_t trsize = sizeof(*trd);
// 找到 todo 列表:优先处理本线程的 todo 列表,同时也处理进程的 todo 列表
binder_inner_proc_lock(proc);
if (!binder_worklist_empty_ilocked(&thread->todo))
list = &thread->todo;
else if (!binder_worklist_empty_ilocked(&proc->todo) &&
wait_for_proc_work)
list = &proc->todo;
else {
binder_inner_proc_unlock(proc);
/* no data added */
if (ptr - buffer == 4 && !thread->looper_need_return)
goto retry;
break;
}
if (end - ptr < sizeof(tr) + 4) {
binder_inner_proc_unlock(proc);
break;
}
w = binder_dequeue_work_head_ilocked(list);
if (binder_worklist_empty_ilocked(&thread->todo))
thread->process_todo = false;
// 上面 binder_thread_write 那里塞了个 BINDER_WORK_TRANSACTION_COMPLETE 到当前线程的 todo 列表里
// 这里回写个 BR_TRANSACTION_COMPLETE 到用户空间,然后跳转到 retry 休眠线程
switch (w->type) {
case BINDER_WORK_TRANSACTION_COMPLETE:
case BINDER_WORK_TRANSACTION_ONEWAY_SPAM_SUSPECT: {
if (proc->oneway_spam_detection_enabled &&
w->type == BINDER_WORK_TRANSACTION_ONEWAY_SPAM_SUSPECT)
cmd = BR_ONEWAY_SPAM_SUSPECT;
else
cmd = BR_TRANSACTION_COMPLETE;
binder_inner_proc_unlock(proc);
kfree(w);
binder_stats_deleted(BINDER_STAT_TRANSACTION_COMPLETE);
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
binder_debug(BINDER_DEBUG_TRANSACTION_COMPLETE,
"%d:%d BR_TRANSACTION_COMPLETE\n",
proc->pid, thread->pid);
} break;
// 在 retry 里休眠的线程,直到被 server 唤醒,当然不一定是刚才那个线程,可能是被别的线程抢到了
// server 进程在 binder_thread_write -> binder_transaction 最后会通过 wake_up_interruptible
// 唤醒目标线程,也就是 client 发送 request 的那个线程
case BINDER_WORK_TRANSACTION: {
binder_inner_proc_unlock(proc);
t = container_of(w, struct binder_transaction, work);
} break;
// ...
} // switch-end
if (!t)
continue;
// 拿到 binder_transaction 后继续流程
BUG_ON(t->buffer == NULL);
if (t->buffer->target_node) {
struct binder_node *target_node = t->buffer->target_node;
trd->target.ptr = target_node->ptr;
trd->cookie = target_node->cookie;
binder_transaction_priority(thread, t, target_node);
cmd = BR_TRANSACTION;
} else {
trd->target.ptr = 0;
trd->cookie = 0;
cmd = BR_REPLY;
}
trd->code = t->code;
trd->flags = t->flags;
trd->sender_euid = from_kuid(current_user_ns(), t->sender_euid);
t_from = binder_get_txn_from(t);
if (t_from) {
struct task_struct *sender = t_from->proc->tsk;
trd->sender_pid =
task_tgid_nr_ns(sender,
task_active_pid_ns(current));
trace_android_vh_sync_txn_recvd(thread->task, t_from->task);
} else {
trd->sender_pid = 0;
}
ret = binder_apply_fd_fixups(proc, t);
if (ret) {
struct binder_buffer *buffer = t->buffer;
bool oneway = !!(t->flags & TF_ONE_WAY);
int tid = t->debug_id;
if (t_from)
binder_thread_dec_tmpref(t_from);
buffer->transaction = NULL;
binder_cleanup_transaction(t, "fd fixups failed",
BR_FAILED_REPLY);
binder_free_buf(proc, thread, buffer, true);
binder_debug(BINDER_DEBUG_FAILED_TRANSACTION,
"%d:%d %stransaction %d fd fixups failed %d/%d, line %d\n",
proc->pid, thread->pid,
oneway ? "async " :
(cmd == BR_REPLY ? "reply " : ""),
tid, BR_FAILED_REPLY, ret, __LINE__);
if (cmd == BR_REPLY) {
cmd = BR_FAILED_REPLY;
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
break;
}
continue;
}
trd->data_size = t->buffer->data_size;
trd->offsets_size = t->buffer->offsets_size;
trd->data.ptr.buffer = (uintptr_t)t->buffer->user_data;
trd->data.ptr.offsets = trd->data.ptr.buffer +
ALIGN(t->buffer->data_size,
sizeof(void *));
tr.secctx = t->security_ctx;
if (t->security_ctx) {
cmd = BR_TRANSACTION_SEC_CTX;
trsize = sizeof(tr);
}
if (put_user(cmd, (uint32_t __user *)ptr)) {
if (t_from)
binder_thread_dec_tmpref(t_from);
binder_cleanup_transaction(t, "put_user failed",
BR_FAILED_REPLY);
return -EFAULT;
}
ptr += sizeof(uint32_t);
if (copy_to_user(ptr, &tr, trsize)) {
if (t_from)
binder_thread_dec_tmpref(t_from);
binder_cleanup_transaction(t, "copy_to_user failed",
BR_FAILED_REPLY);
return -EFAULT;
}
ptr += trsize;
trace_binder_transaction_received(t);
binder_stat_br(proc, thread, cmd);
binder_debug(BINDER_DEBUG_TRANSACTION,
"%d:%d %s %d %d:%d, cmd %u size %zd-%zd ptr %016llx-%016llx\n",
proc->pid, thread->pid,
(cmd == BR_TRANSACTION) ? "BR_TRANSACTION" :
(cmd == BR_TRANSACTION_SEC_CTX) ?
"BR_TRANSACTION_SEC_CTX" : "BR_REPLY",
t->debug_id, t_from ? t_from->proc->pid : 0,
t_from ? t_from->pid : 0, cmd,
t->buffer->data_size, t->buffer->offsets_size,
(u64)trd->data.ptr.buffer,
(u64)trd->data.ptr.offsets);
if (t_from)
binder_thread_dec_tmpref(t_from);
t->buffer->allow_user_free = 1;
if (cmd != BR_REPLY && !(t->flags & TF_ONE_WAY)) {
binder_inner_proc_lock(thread->proc);
t->to_parent = thread->transaction_stack;
t->to_thread = thread;
thread->transaction_stack = t;
binder_inner_proc_unlock(thread->proc);
} else {
binder_free_transaction(t);
}
break;
} // while-end
done:
*consumed = ptr - buffer;
binder_inner_proc_lock(proc);
if (proc->requested_threads == 0 &&
list_empty(&thread->proc->waiting_threads) &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED)) /* the user-space code fails to */
/*spawn a new thread if we leave this out */) {
proc->requested_threads++;
binder_inner_proc_unlock(proc);
binder_debug(BINDER_DEBUG_THREADS,
"%d:%d BR_SPAWN_LOOPER\n",
proc->pid, thread->pid);
if (put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer))
return -EFAULT;
binder_stat_br(proc, thread, BR_SPAWN_LOOPER);
} else
binder_inner_proc_unlock(proc);
return 0;
}
// prepare_to_wait + schedule + finish_wait 是一整套线程调度模板(休眠线程)
// see https://github.com/cyrus-lin/bookmark/issues/45
// 它使线程休眠在 binder_thread.wait 上直到别的线程通过 wake_up(head) 唤醒它
static int binder_wait_for_work(struct binder_thread *thread,
bool do_proc_work)
{
DEFINE_WAIT(wait);
struct binder_proc *proc = thread->proc;
int ret = 0;
binder_inner_proc_lock(proc);
for (;;) {
prepare_to_wait(&thread->wait, &wait, TASK_INTERRUPTIBLE|TASK_FREEZABLE);
if (binder_has_work_ilocked(thread, do_proc_work))
break;
if (do_proc_work)
list_add(&thread->waiting_thread_node,
&proc->waiting_threads);
trace_android_vh_binder_wait_for_work(do_proc_work, thread, proc);
binder_inner_proc_unlock(proc);
schedule();
binder_inner_proc_lock(proc);
list_del_init(&thread->waiting_thread_node);
if (signal_pending(current)) {
ret = -EINTR;
break;
}
}
finish_wait(&thread->wait, &wait);
binder_inner_proc_unlock(proc);
return ret;
}binder 线程主例程
binder 线程(包括主线程和普通线程)的主循环是 getAndExecuteCommand(),它有两个关键方法:talkWithDriver() 和 executeCommand(cmd)
talkWithDriver() 发送 BINDER_WRITE_READ 指令,write 是应用进程发送给 binder driver 处理的任务,可能是空的,read 是 binder driver 需要返回给应用进程的数据,此时如果任务队列(binder_thread.todo or binder_proc.todo)为空,会通过 schedule() 让渡出 CPU,也即是让 binder 线程阻塞在这里,所以在 anr 日志里经常看到下面的调用栈:
// binder 线程因为任务队列为空,阻塞在 binder_thread_read 方法
"Binder_1" prio=5 tid=12 Native
| group="main" sCount=1 dsCount=0 obj=0x12c7c0a0 self=0x7f96828800
| sysTid=1144 nice=0 cgrp=default sched=0/0 handle=0x7f9be97000
| state=S schedstat=( 1577699930 1373220151 5401 ) utm=113 stm=44 core=0 HZ=100
| stack=0x7f89c27000-0x7f89c29000 stackSize=1008KB
| held mutexes=
kernel: __switch_to+0x8c/0x98
kernel: binder_thread_read+0xe5c/0x117c
kernel: binder_ioctl_write_read+0x1a8/0x3c8
kernel: binder_ioctl+0x3c0/0x688
kernel: do_vfs_ioctl+0x368/0x588
kernel: SyS_ioctl+0x80/0x98
kernel: cpu_switch_to+0x48/0x4c
native: #00 pc 00062dc0 /system/lib64/libc.so (__ioctl+4)
native: #01 pc 000891e8 /system/lib64/libc.so (ioctl+96)
native: #02 pc 0002993c /system/lib64/libbinder.so (android::IPCThreadState::talkWithDriver(bool)+164)
native: #03 pc 0002a174 /system/lib64/libbinder.so (android::IPCThreadState::getAndExecuteCommand()+24)
native: #04 pc 0002a22c /system/lib64/libbinder.so (android::IPCThreadState::joinThreadPool(bool)+76)
native: #05 pc 00031bc8 /system/lib64/libbinder.so (???)
native: #06 pc 0001750c /system/lib64/libutils.so (android::Thread::_threadLoop(void*)+208)
native: #07 pc 000947c4 /system/lib64/libandroid_runtime.so (android::AndroidRuntime::javaThreadShell(void*)+96)
native: #08 pc 00016d4c /system/lib64/libutils.so (???)
native: #09 pc 0001f000 /system/lib64/libc.so (__pthread_start(void*)+52)
native: #10 pc 0001b340 /system/lib64/libc.so (__start_thread+16)
(no managed stack frames)
"Binder_2" prio=5 tid=13 Native
| group="main" sCount=1 dsCount=0 obj=0x12c970a0 self=0x7f9ccb5800
| sysTid=1146 nice=0 cgrp=default sched=0/0 handle=0x7f9be7c000
| state=S schedstat=( 1579795734 1531888975 5458 ) utm=117 stm=40 core=0 HZ=100
| stack=0x7f89b2a000-0x7f89b2c000 stackSize=1008KB
| held mutexes=
kernel: __switch_to+0x8c/0x98
kernel: binder_thread_read+0xe5c/0x117c
kernel: binder_ioctl_write_read+0x1a8/0x3c8
kernel: binder_ioctl+0x3c0/0x688
kernel: do_vfs_ioctl+0x368/0x588
kernel: SyS_ioctl+0x80/0x98
kernel: cpu_switch_to+0x48/0x4c
native: #00 pc 00062dc0 /system/lib64/libc.so (__ioctl+4)
native: #01 pc 000891e8 /system/lib64/libc.so (ioctl+96)
native: #02 pc 0002993c /system/lib64/libbinder.so (android::IPCThreadState::talkWithDriver(bool)+164)
native: #03 pc 0002a174 /system/lib64/libbinder.so (android::IPCThreadState::getAndExecuteCommand()+24)
native: #04 pc 0002a22c /system/lib64/libbinder.so (android::IPCThreadState::joinThreadPool(bool)+76)
native: #05 pc 00031bc8 /system/lib64/libbinder.so (???)
native: #06 pc 0001750c /system/lib64/libutils.so (android::Thread::_threadLoop(void*)+208)
native: #07 pc 000947c4 /system/lib64/libandroid_runtime.so (android::AndroidRuntime::javaThreadShell(void*)+96)
native: #08 pc 00016d4c /system/lib64/libutils.so (???)
native: #09 pc 0001f000 /system/lib64/libc.so (__pthread_start(void*)+52)
native: #10 pc 0001b340 /system/lib64/libc.so (__start_thread+16)
(no managed stack frames)
"Binder_5" prio=5 tid=65 Native
| group="main" sCount=1 dsCount=0 obj=0x131ed100 self=0x7f96834000
| sysTid=2014 nice=0 cgrp=default sched=0/0 handle=0x7f86ceb000
| state=S schedstat=( 1519499135 1394211486 5073 ) utm=109 stm=42 core=0 HZ=100
| stack=0x7f83adc000-0x7f83ade000 stackSize=1008KB
| held mutexes=
kernel: __switch_to+0x8c/0x98
kernel: binder_thread_read+0xe5c/0x117c
kernel: binder_ioctl_write_read+0x1a8/0x3c8
kernel: binder_ioctl+0x3c0/0x688
kernel: do_vfs_ioctl+0x368/0x588
kernel: SyS_ioctl+0x80/0x98
kernel: cpu_switch_to+0x48/0x4c
native: #00 pc 00062dc0 /system/lib64/libc.so (__ioctl+4)
native: #01 pc 000891e8 /system/lib64/libc.so (ioctl+96)
native: #02 pc 0002993c /system/lib64/libbinder.so (android::IPCThreadState::talkWithDriver(bool)+164)
native: #03 pc 0002a174 /system/lib64/libbinder.so (android::IPCThreadState::getAndExecuteCommand()+24)
native: #04 pc 0002a22c /system/lib64/libbinder.so (android::IPCThreadState::joinThreadPool(bool)+76)
native: #05 pc 00031bc8 /system/lib64/libbinder.so (???)
native: #06 pc 0001750c /system/lib64/libutils.so (android::Thread::_threadLoop(void*)+208)
native: #07 pc 000947c4 /system/lib64/libandroid_runtime.so (android::AndroidRuntime::javaThreadShell(void*)+96)
native: #08 pc 00016d4c /system/lib64/libutils.so (???)
native: #09 pc 0001f000 /system/lib64/libc.so (__pthread_start(void*)+52)
native: #10 pc 0001b340 /system/lib64/libc.so (__start_thread+16)
(no managed stack frames)// https://cs.android.com/android/platform/superproject/+/master:frameworks/native/libs/binder/IPCThreadState.cpp
void IPCThreadState::joinThreadPool(bool isMain /* true - 主线程*/ )
{
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
status_t result;
mIsLooper = true;
do {
processPendingDerefs();
// now get the next command to be processed, waiting if necessary
result = getAndExecuteCommand();
// Let this thread exit the thread pool if it is no longer
// needed and it is not the main process thread.
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
mOut.writeInt32(BC_EXIT_LOOPER);
mIsLooper = false;
talkWithDriver(false);
}
status_t IPCThreadState::getAndExecuteCommand()
{
status_t result;
int32_t cmd;
result = talkWithDriver();
if (result >= NO_ERROR) {
size_t IN = mIn.dataAvail();
if (IN < sizeof(int32_t)) return result;
cmd = mIn.readInt32();
// ...
result = executeCommand(cmd);
// ...
}
// write 指 binder driver 需要处理的数据,read 指应用进程想要收到的数据
// 发送 BINDER_WRITE_READ 给 binder driver
status_t IPCThreadState::talkWithDriver(bool doReceive /* default true */)
{
if (mProcess->mDriverFD < 0) {
return -EBADF;
}
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
// We don't want to write anything if we are still reading
// from data left in the input buffer and the caller
// has requested to read the next data.
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
// Return immediately if there is nothing to do.
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
if (mProcess->mDriverFD < 0) {
err = -EBADF;
}
} while (err == -EINTR);
// ...
}
// 进入内核,具体是 binder driver
// https://cs.android.com/android/kernel/superproject/+/common-android-mainline:common/drivers/android/binder.c
static long binder_ioctl(struct file *filp, unsigned int cmd /* BINDER_WRITE_READ */, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
binder_selftest_alloc(&proc->alloc);
trace_binder_ioctl(cmd, arg);
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
if (ret)
goto err_unlocked;
thread = binder_get_thread(proc);
if (thread == NULL) {
ret = -ENOMEM;
goto err;
}
switch (cmd) {
case BINDER_WRITE_READ:
ret = binder_ioctl_write_read(filp, cmd, arg, thread);
if (ret)
goto err;
break;
// ...
}
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
if (size != sizeof(struct binder_write_read)) {
ret = -EINVAL;
goto out;
}
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
// binder 首先处理应用进程发送过来的数据
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread,
bwr.write_buffer,
bwr.write_size,
&bwr.write_consumed);
trace_binder_write_done(ret);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
// 然后返回应用进程想要的数据
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
trace_binder_read_done(ret);
binder_inner_proc_lock(proc);
if (!binder_worklist_empty_ilocked(&proc->todo))
binder_wakeup_proc_ilocked(proc);
binder_inner_proc_unlock(proc);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
// ...
}
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
retry:
binder_inner_proc_lock(proc);
wait_for_proc_work = binder_available_for_proc_work_ilocked(thread);
binder_inner_proc_unlock(proc);
thread->looper |= BINDER_LOOPER_STATE_WAITING;
trace_binder_wait_for_work(wait_for_proc_work,
!!thread->transaction_stack,
!binder_worklist_empty(proc, &thread->todo));
if (wait_for_proc_work) {
// 在章节【主线程与普通线程】里讲过,应用进程将 binder 线程起起来后会发送 BC_ENTER_LOOPER | BC_REGISTER_LOOPER 给 binder driver
// 从而打开 BINDER_LOOPER_STATE_ENTERED | BINDER_LOOPER_STATE_REGISTERED 标志位
// BINDER_LOOPER_STATE_ENTERED 表示主线程,BINDER_LOOPER_STATE_REGISTERED 表示普通线程
if (!(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED))) {
binder_user_error("%d:%d ERROR: Thread waiting for process work before calling BC_REGISTER_LOOPER or BC_ENTER_LOOPER (state %x)\n",
proc->pid, thread->pid, thread->looper);
wait_event_interruptible(binder_user_error_wait,
binder_stop_on_user_error < 2);
}
trace_android_vh_binder_restore_priority(NULL, current);
binder_restore_priority(thread, &proc->default_priority);
}
if (non_block) {
if (!binder_has_work(thread, wait_for_proc_work))
ret = -EAGAIN;
} else {
// 当前线程让渡出 CPU 直到 todo 列表里有任务,在章节【binder 线程主例程】里介绍过此函数以及对应的
// prepare_to_wait & schedule & finish_wait 进程/线程调度 API
ret = binder_wait_for_work(thread, wait_for_proc_work);
}
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
// ...
}